open loop system이란 피드백이 없는 시스템으로, 피드백이 없기때문에 출력의 신호를 이용하지 못한다.
open loop system의 특징은 다음과 같다.
- open loop system은 원하는 출력을 갖기 위해선 여러 입력을 가해 원하는 출력을 만들때까지 반복하는 시행착오방법을 사용하여 시스템을 설계한다
- 시스템에 외란이 발생하게 되면 시스템을 다시 설계해야한다
- 시스템이 바뀌면(차량의 무게 증가, 대상의 변경 등) 시스템을 다시 설계해야한다 = 강인성이 떨어진다
이러한 open loop system의 특성을 이해하기 위해 앞에서 이야기한 진동-감쇠 시스템을 제어해보자.
(4)에서 했던 글의 내용을 정리하면 다음과 같다.
자유물체도 :

미분방정식 :
\[m \ddot{x}+b\dot{x}+kx=f(t)\]
\(m=10kg, b=5N\cdot s/m, k=20N/m\), 초기조건 : \(x(0)=0m, \dot{x}(0)=0m/s\)
전달함수 :
\[\frac{X(s)}{F(s)}=\frac{1}{ms^2+bs+k}\]
Simulink :

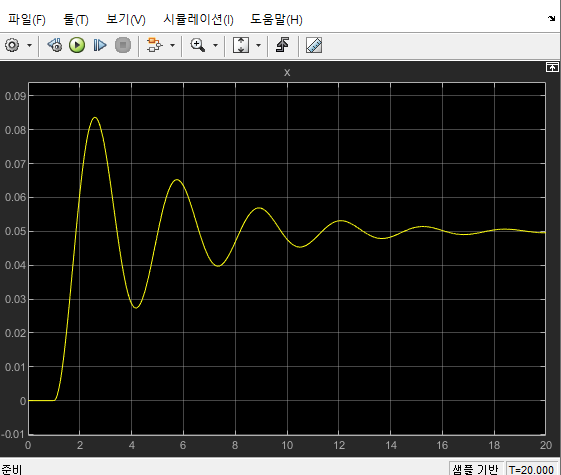
이 형태는 개루프 시스템의 한 예이다. 진동-감쇠 시스템의 입력은 힘 F(t)이고, 출력은 변위 x이다. 즉 우리는 힘을 적절하게 조절하여 진동-감쇠 시스템의 변위를 적절하게 조절할 수 있다. 먼저 입력이 크기가 1인 step 함수일 때를 고려해보자. 중단시간은 20초로 설정하였다.

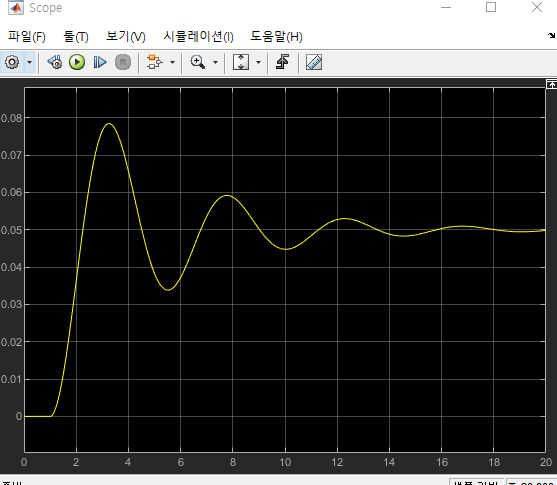
이때는 값이 0.05에 가까워지는 것을 알 수 있다.
이번엔 입력이 크기가 2인 step 함수일 때를 보자.

이때는 값이 0.1에 가까워지는 것을 알 수 있다.
이러한 이유는 이 시스템이 선형 시스템이기 때문에 입력과 출력이 서로 정비례하기 때문이다.
이번에는 입력이 크기가 -1인 step 함수일 때를 보자.

이때는 -0.05로 수렴하는 것을 알 수 있다
따라서 목표로 하는 변위를 가지기 위해 입력을 조절하여 얻을 수 있다는 사실을 알 수 있다.
예를들어 원하는 변위가 0.2m라면 입력을 4N으로 하면 된다.
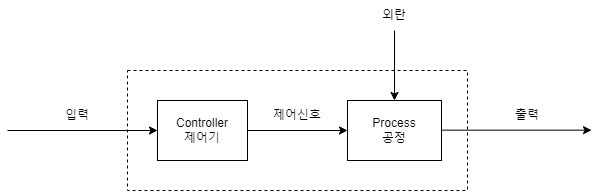
그렇다면 개루프 시스템은 외란에 대해 어떻게 반응하는지 살펴보자.
외란이란 시스템의 동작이나 성능에 영향을 미치는 원치 않거나 예상치 못한 입력이나 힘을 말한다.
이러한 외란은 온도나 습도, 시스템의 소음, 진동이나 충격 또는 시스템 작동 조건의 변화와 같은 환경의 변화에 따라 발생한다.
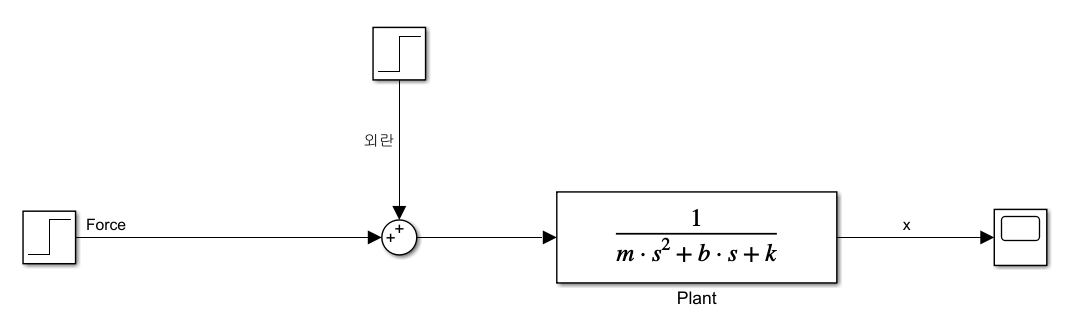
이 시스템에서 외란을 외부에서 가해지는 힘이라고 생각해보자. 예를 들어 외부에서 5초 2N의 힘이 물체에 가해지는 경우이다.
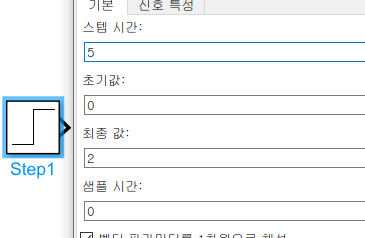
외란을 Simulink에 구현하기 위해 Step 블록을 이용하자.
먼저 Step 블록을 생성하고 스텝시간을 5초로, 최종값을 2로 설정하자.
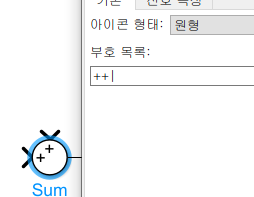
sum 블록을 이용해 외란을 입력과 연결하자. 먼저 sum 블록을 더블클릭하여 부호목록을 다음과 같이 변경한다.
이제 입력과 외란을 연결하고 출력을 Plant로 보내면 다음과같은 블록선도가 그려진다.
입력 step 블록의 최종값을 1로 설정하고 결과를 구하면 다음과 같다.

앞에서 외란이 없을때와 비교하면 다음과 같다.
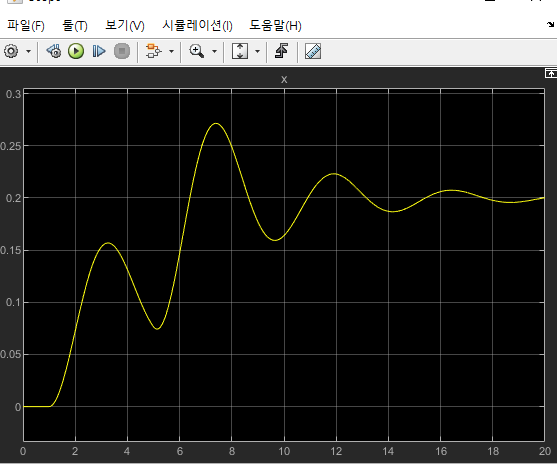
결과를 보면 알 수 있듯이 외란이 생기면 도달하는 값(정상상태 값)이 달라진다. 따라서 개루프시스템은 외란에 영향을 많이 받고, 원하는 출력을 구하기 위해 다시 입력을 조절해야 한다.
이번엔 시스템을 변경했을 때 개루프시스템의 변화를 알아보자.
만약 스프링상수가 k에서 2k로 바뀐다면 시스템의 출력은 어떻게 변할까?
앞의 시스템에서 외란을 제거하고 전달함수의 b를 2b로 바꿔보자.

결과를 출력해 원래 시스템과 비교하면 다음과 같다.
정상상태 값이 줄어들고 진동하는 시간이 늘어났다는 것을 알 수있다. 따라서 원하는 출력에 도달하기 위해선 입력을 또다시 바꿔야만 한다.
이렇게 시스템이 변화함에따라 성능이 달라지는 걸 강인성이 좋지 않다고 표현하며 개루프 시스템에서는 강인성이 좋지 않다는 것을 알 수있다.
'자동제어 > Simulink' 카테고리의 다른 글
| Simulink 기초 (7) 폐루프 제어, Closed loop system : 2.PI제어 (0) | 2023.03.26 |
|---|---|
| Simulink 기초 (6) 폐루프 제어, Closed loop system : 1.P제어 (0) | 2023.03.26 |
| Simulink 기초 (4) 전달함수, 블록선도 : 진동 - 감쇠 시스템 (0) | 2023.03.24 |
| Simulink 기초 (3) 2차 시스템 모델링 : 진동-감쇠 시스템, 시뮬레이션 설정 (0) | 2023.03.23 |
| Simulink 기초 (2) 미분방정식 만들기 - 수직하강 문제, 블록 (0) | 2023.03.23 |




댓글